Activité 1 : Piloter la rotation grâce aux capteurs lumineux
1 - Problématique
Attendues de fin de cycle et les compétences travaillées
Écrire, mettre au point et exécuter un programme | |
|---|---|
Analyser le comportement attendu d'un système réel et décomposer le problème posé en sous-problèmes afin de structurer un programme de commande. | x |
Écrire, mettre au point (tester, corriger) et exécuter un programme commandant un système réel et vérifier le comportement attendu. | x |
Écrire un programme dans lequel des actions sont déclenchées par des événements extérieurs. | x |
1 - Matériel et Organisation de l'îlot.
| Matériel : |
| Objectif : |
|---|---|---|---|
- - | Le traqueur est composé de 3 capteurs lumineux. Proposer un algorithme permettant de suivre une source lumineuse grâce à ces trois capteurs. (Comment peut-on utiliser ces 3 capteurs pour suivre la lumière ?) | ||
| Informatique : |
| Situation déclenchante : |
Comment permettre au tracker de suivre le soleil ? | |||
| Organisation du groupe : |
| Reformulation : |
|







Rappel : Branchement des capteurs
Le capteur Gauche est branché sur la broche A1
Le capteur Droit est branché sur la broche A0
Le capteur Bas est branché sur la broche A2

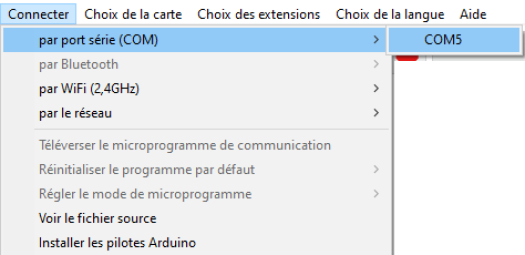
Simuler sur vitascience
Attention : Travail à Faire

Simuler la rotation du traqueur sur Vittascience |
| |
|---|---|---|
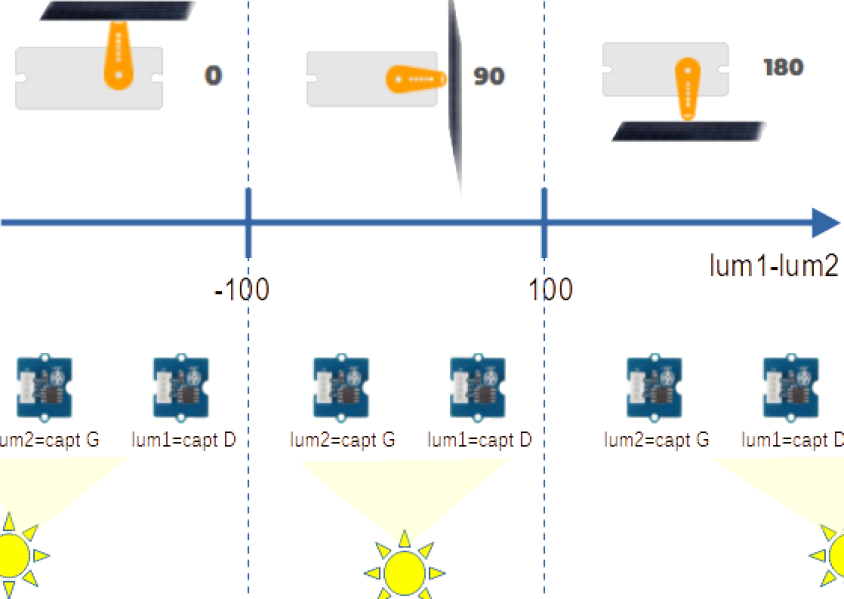
1 | Lum1=Capteur Droit A1 Lum2=Capteur Gauche A2 Compléter le programme ci-dessous afin de réaliser l'algorithme suivant :
|
|
2 | Vérifier votre programme et lancer la simulation | |
Rotation proportionnelle | ||
3 | On voit que dans la partie précédente, le servomoteur ne prend que trois position. On souhaiterait maintenant que l'angle du servomoteur soit proportionnelle à la différence de luminosité entre les deux capteurs. Nous avons la relation suivante :
Modifier votre programme afin de rendre l'angle de rotation du servomoteur proportionnelle à la différence de luminosité entre les deux capteurs. | / signifie divisé 90 / 1023 ≈ 0.088 |
2 - Piloter la rotation
Attention : Travail à Faire
Piloter le tracker en rotation | |
|---|---|
1 | Ouvrir le fichier |
2 | Le modifier afin que le mouvement des servomoteurs ne soit plus contrôlé par les touches du clavier mais par les valeurs des capteurs :
|
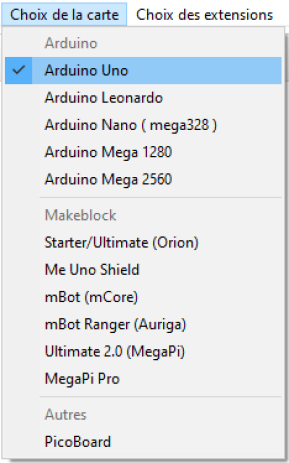
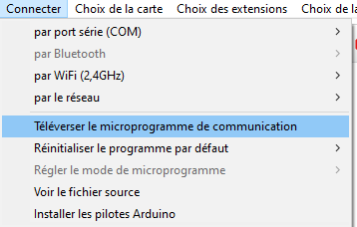
3 | Connecter la carte Arduino à l'ordinateur |
4 |
|
5 | Compléter la fiche activité |
6 |
|
7 |
|



3 - Piloter l'inclinaison du tracker
Attention : Travail à Faire
Piloter l'inclinaison du tracker | |
|---|---|
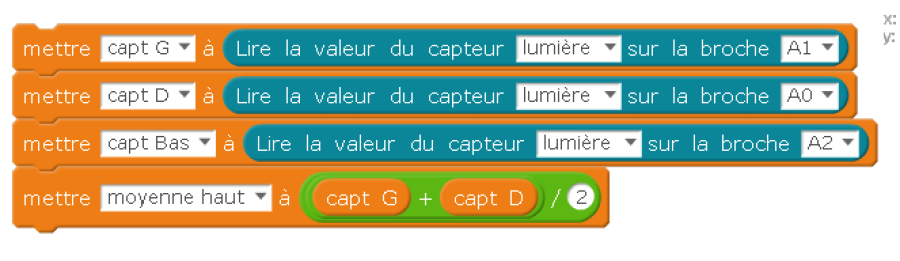
1 | Créer les variables :
|
2 | Donner les valeurs suivantes aux variables : (à mettre dans la boucle répéter indéfiniment) Moyenne haut permet de calculer la luminosité moyenne des capteurs gauche et droit (placés en haut)
|
3 | Compléter votre programme afin de réaliser la fonction suivante :
|
4 | Le servomoteur d'inclinaison est branché en D5 Piloter le servo-moteur d'inclinaison avec le bloc |
5 |
|