Commander le tracker à l'aide du clavier
Attendues de fin de cycle et les compétences travaillées
Exprimer sa pensée à l'aide d'outils de description adaptés | |
|---|---|
Exprimer sa pensée à l'aide d'outils de description adaptés : croquis, schémas, graphes, diagrammes, tableaux. | x |
Écrire, mettre au point et exécuter un programme | |
Analyser le comportement attendu d'un système réel et décomposer le problème posé en sous-problèmes afin de structurer un programme de commande. | x |
Écrire, mettre au point (tester, corriger) et exécuter un programme commandant un système réel et vérifier le comportement attendu. | x |
Écrire un programme dans lequel des actions sont déclenchées par des événements extérieurs. | x |
1 - Matériel et Organisation de l'îlot.
| Matériel : |
| Objectif : |
|---|---|---|---|
1 Tracker solaire Servomoteur rotation : Branché en D6 Servomoteur inclinaison : Branché en D5 | Piloter le tracker à l'aide des touches du clavier. | ||
| Informatique : |
| Situation déclenchante : |
- | Comment incliner le tracker ? | ||
| Organisation du groupe : |
| Reformulation : |
|






PARTIE 1 - Piloter un servomoteur à l'aide du clavier
Fondamental : Le cahier des charges

Nous voulons créer un programme qui doit permettre au robot de : positionner son servomoteur à 90° ;
|
Attention : Travail à Faire - Diagramme d'activité

1 | Ouvrir le fichier : |
|---|---|
Notion de variable | |
2 | Consulter la vidéo qui explique le principe de la variable informatique |
2 | Ouvrir le logiciel mBlock |
3 | Recopier le programme ci-dessous :
Observer la couleur des blocs pour connaître la catégorie où vous allez les trouver. |
4 |
|
5 | Compléter la partie 1 de la fiche d'activité - Qu'est ce qu'une variable ? |
Diagramme d'activité | |
6 | Compléter le diagramme d'activité[1] que décrit l'algorithme ci-dessous : Nous voulons créer un programme qui doit permettre au robot de : positionner son servomoteur à 90° ;
|
7 |
|
8 |
|








Piloter le système avec mBlock
Attention : Travail à Faire - Programmation mBlock
1 | Ouvrir le logiciel mblock |
|---|---|
2 | Câbler le système en respectant le numéro des broches indiqué dans la partie matériel. |
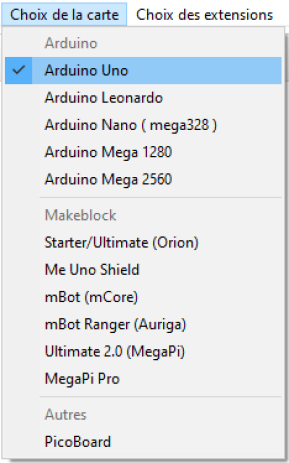
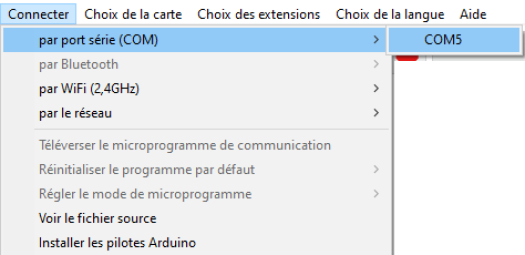
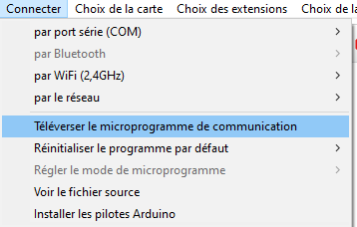
3 | Connecter la carte Arduino à l'ordinateur |
4 |
|
5 | EVENEMENTS : Votre programme doit commencer par :
Vous n'oublierez pas de cliquer dessus pour activer le programme. |
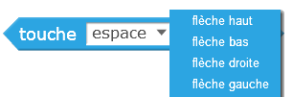
6 | Regarder la vidéo sur les instructions conditionnelles CONTROLE : On répète indéfiniment (en boucle) le bloc CONTROLE : Si la condition est vraie, alors on exécute la commande CAPTEUR : Touche............. est cliquée |
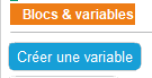
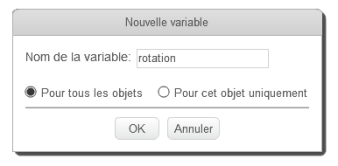
7 | Créer une variable appelée rotation :
|
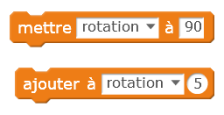
8 | Piloter le servomoteur Le servo-moteur à commander se trouve sur la broche D6 Ce bloc de programme
|
6 | Tester votre programme en cliquant sur le drapeau vert |
7 |
|




PARTIE 2 - Limiter l'angle de rotation
Problème

Vous avez sans doute constaté que lorsque la variable "rotation" dépasse certaines valeurs, le servomoteur fait un tour sur lui même. En réalité la valeur de la variable "rotation" doit être comprise entre 0 et 255. Limiter la valeur de rotation entre 0 et 255 |
Attention : TRAVAIL A FAIRE
8 | Modifier le programme précédent de manière à ce que la valeur de la variable rotation soit toujours comprise entre 0 et 255. Autrement dit :
|
|---|
PARTIE 3 - Piloter l'inclinaison du tracker
Attention : TRAVAIL A FAIRE
9 | Le servomoteur générant l'inclinaison du tracker est connecté sur la broche D5. La valeur de l'inclinaison doit être comprise entre 0 et 170 degrés. Inspirer vous de ce qui a été fait dans les parties 1 et 2 pour piloter la rotation et l'inclinaison du tracker. Créer une variable inclinaison
|
|---|
PARTIE 4 - Piloter à l'aide du Joystick
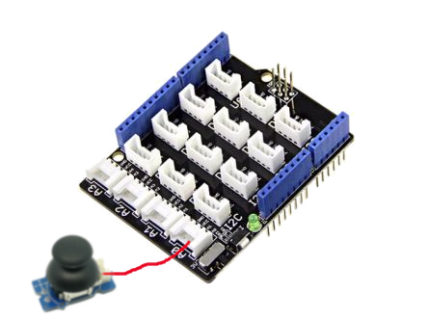
Fondamental : Matériel
Le Joystick est connecté sur la broche A0 du shield Grove
Attention : Travail à Faire
1 | Ouvrir le fichier mBlock |
|---|---|
2 | Brancher un joystick |
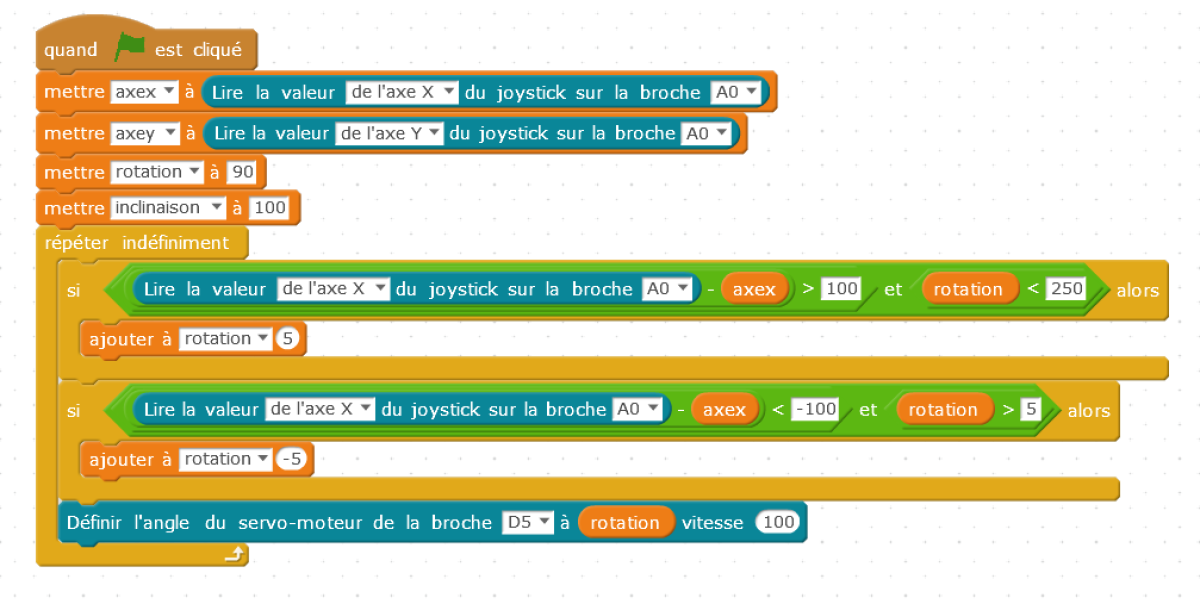
3 | Ce programme permet uniquement de piloter la rotation du tracker.
Compléter le afin de piloter l'inclinaison. Utiliser les variables :
Le servomoteur d'inclinaison est branché en D5 |

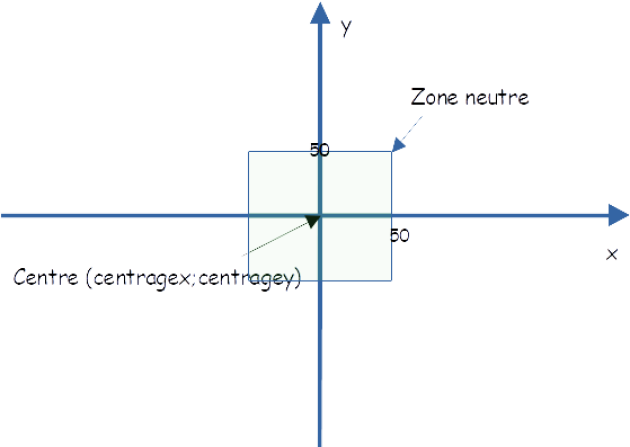
Complément : Explication du centrage d'un joystick