Suiveur de ligne
I - Problématique
Attendues de fin de cycle et les compétences travaillées
Utiliser une modélisation et simuler le comportement d'un objet | |
|---|---|
Simuler numériquement la structure et/ou le comportement d'un objet. Interpréter le comportement de l'objet technique et le communiquer en argumentant. | x |
Écrire, mettre au point et exécuter un programme | |
Analyser le comportement attendu d'un système réel et décomposer le problème posé en sous-problèmes afin de structurer un programme de commande. | x |
Écrire, mettre au point (tester, corriger) et exécuter un programme commandant un système réel et vérifier le comportement attendu. | x |
Écrire un programme dans lequel des actions sont déclenchées par des événements extérieurs. | x |
1 - Matériel et Organisation de l'îlot.
| Matériel : |
| Objectif : |
|---|---|---|---|
- - |
| ||
| Informatique : |
| Situation déclenchante : |
-
- | Programmer votre robot mbot de manière à ce qu'il soit capable de suivre une ligne noire. | ||
| Organisation du groupe : |
| Reformulation : |
|







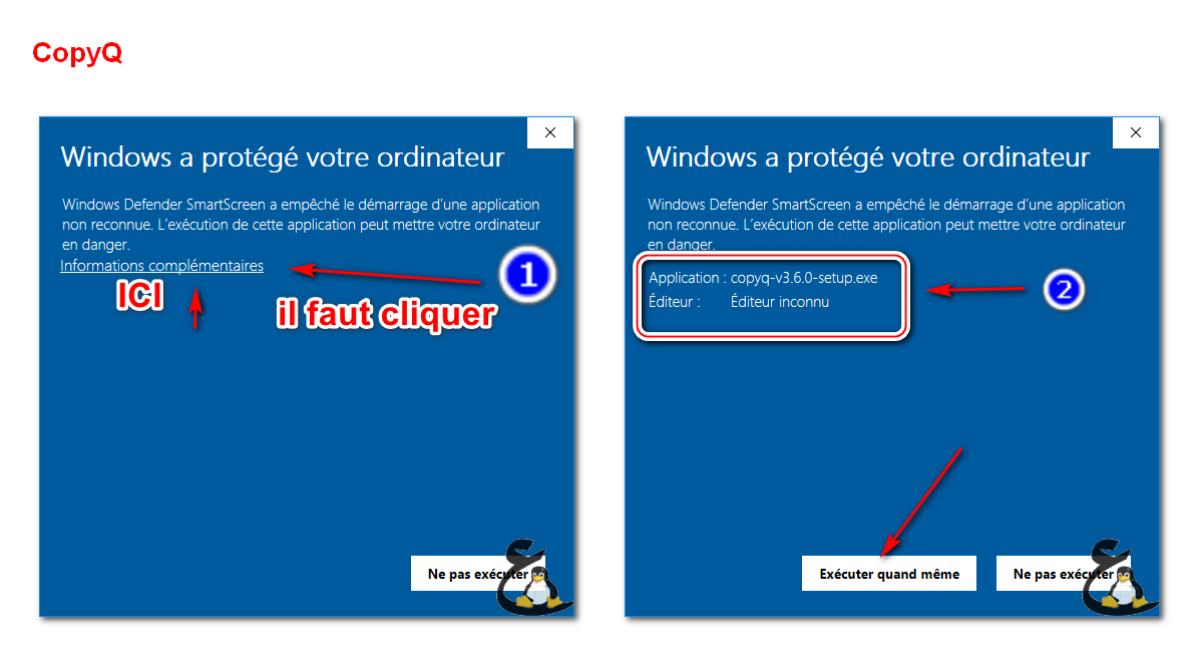
1 - Installation du logiciel

1 | Télécharger le logiciel : Lien téléchargement : http://www.irai.com/mbs/setup.exe |
|---|---|
2 | Installer et paramétrer le logiciel : Bien consulter "installation et paramétrage" pour installer correctement le logiciel. Les messages d'alerte |
4 - Activité
4.1 Analyse du problème

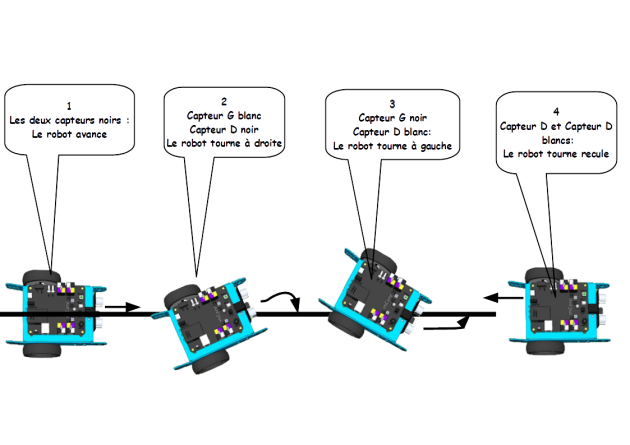
Vous devez programmer votre robot mbot de manière à ce qu'il soit capable de suivre automatiquement la ligne noire au sol. |
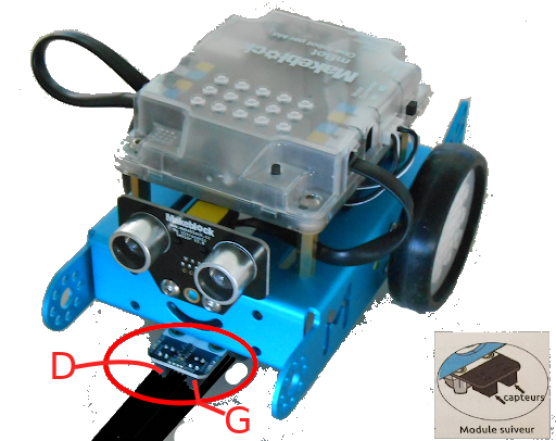
Le robot mbot est équipé d'un module suiveur de ligne. Ce module est doté de deux capteurs, 1 Gauche et 1 Droit. |
Attention : Travail à Faire
1 | Compléter l'algorithme et le diagramme d'activité (algo_activité_suiveur_ligne.pdf [pdf])de notre système en vous aidant du schéma ci-dessus. |
|---|
4.2 Programmation avec mBlock
Attention : Travail à Faire
1 | Cliquer sur |
|---|---|
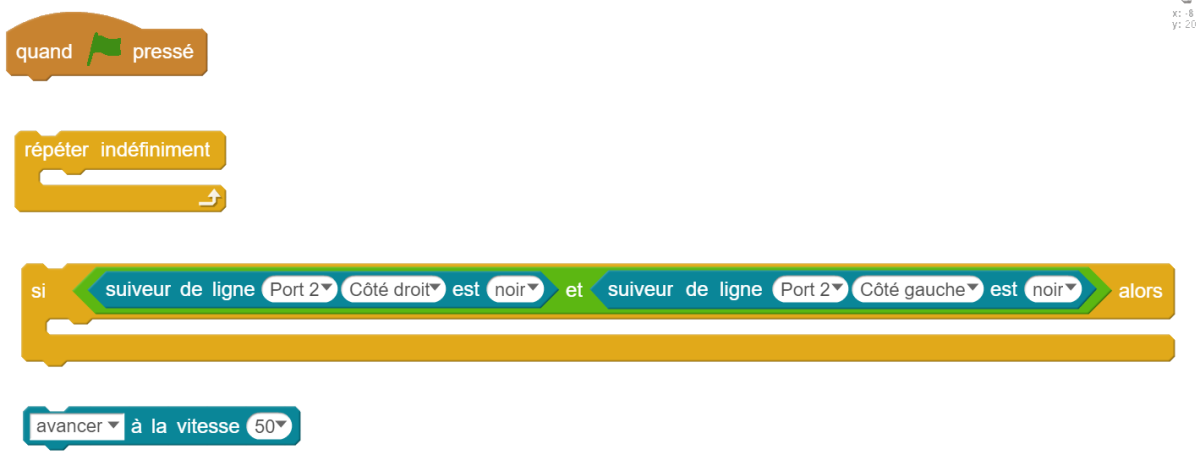
2 | Programmer votre système en utilisant notamment les blocs suivants :
|
3 | Tester votre programme en cliquant sur le drapeau vert |


Conseil : Blocs à utiliser
Utiliser entre autre les blocs suivants : (liste non exhaustive)
4.3 Pour aller plus loin
Faire varier la vitesse de déplacement du robot. |
Attention : Travail à Faire
4 | Modifier votre programme afin de pouvoir changer la vitesse de déplacement du robot au cours de l'exécution du programme. |
|---|
Méthode : Comment faire varier la vitesse de déplacement ?
La vitesse de déplacement du robot est définie par un nombre pouvant aller de 0 à 255 (la vitesse est codée en réalité sur un octet binaire) 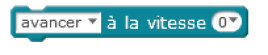
- Nous pouvons changer la valeur de la vitesse en créant une variable que nous pouvons par exemple appeler "vitesse" 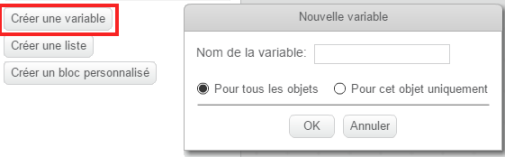
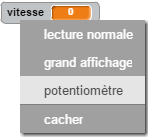
- Nous allons changer la valeur de la variable vitesse en utilisant un bouton potentiomètre.
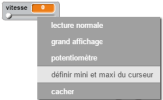
Dans la zone scène de mBlock (à gauche de l'écran là ou se trouve le panda !) cliquer droit sur la variable "vitesse "
Sélectionner potentiomètre
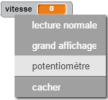
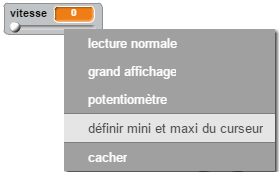
- Définir la valeur minimale (0) et maximale (255) de la variable vitesse.
Dans la zone scène de mBlock (à gauche de l'écran là ou se trouve le panda !) cliquer droit sur la variable "vitesse "
Sélectionner potentiomètre